Introduction
Rando is a dynamic walking robot which was developed with an open-source mindset, to expand accessibility to and involvement in walking robot education and research. In particular this kit is intended to promote the use of Maker-style methods, materials, and components for better robot enginering design as well as the use of such devices for simplified scientific studies of fundamental principles of legged locomotion.
Rando the Walking Robot
Rando has four legs which are operated in pairs to achieve effectively bipedal locomotion, while the leg configuration helps ensure passive lateral stability. The robot uses a prismatic "ankle" to apply discrete push-off actuation, and a foot switch on each of the leg pairs (inner and outer ) to detect ground contact. A very simple control algorithm is used to trigger a push-off event on the trailing leg in walking which is proportional to the amount of time elapsed since the previous ground-contact event of the opposite leg. The effect of this is to restore the appropriate amount of energy lost between each step and continue walking at steady state.

Hiking with Rando on Schynige Platte
(Disclaimer: the robot cannot actually hike over such rough terrain...yet )

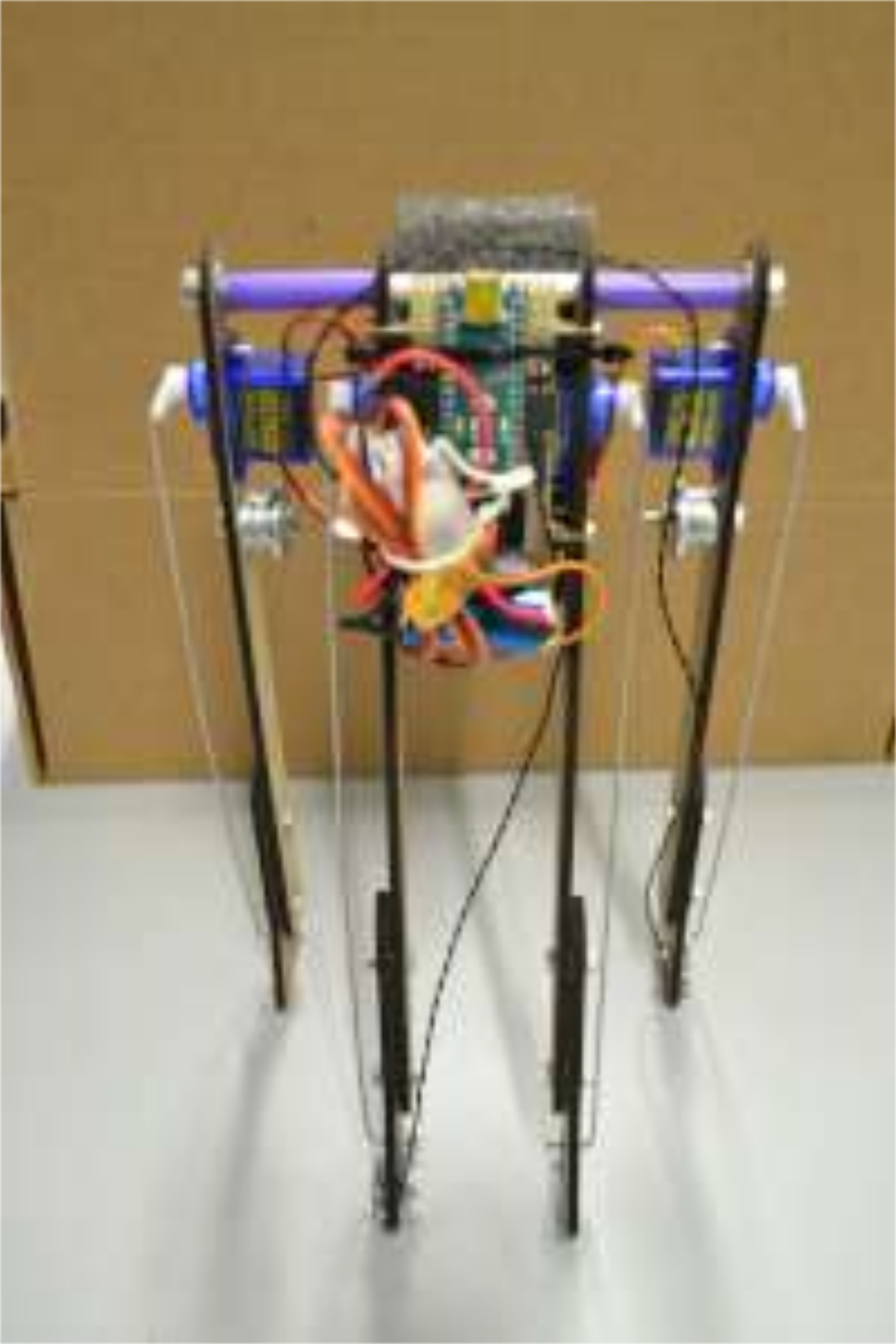
Side and front view of Rando
Build one
A list of necessary components and design files are provided for fabricating a Rando walking robot from scratch. All components are either available off-the-shelf from a variety of suppliers, or fabricated with common hobby or Maker tools.


Assembly Instructions
Instructions coming soonList of Parts and Materials
Mechanical:
| Quantity | Part | Supplier | Cost |
| 4 | Micro Servo | Tower Pro SG90 | $15.16 |
| 4 | M2.5x10 Screw | Mcmaster | $0.40 |
| 8 | M3x10 Screw | Mcmaster | $0.36 |
| 4 | M3x8 Screw | Mcmaster | $0.12 |
| 4 | M2x10 Screw | Mcmaster | $0.15 |
| 2 | M4x16 Screw | Mcmaster | $0.17 |
| 2 | M5x10 Screw | Mcmaster | $0.16 |
| 4 | M2.5 Hex Nut | Mcmaster | $0.04 |
| 4 | M3 Hex Nut | Mcmaster | $0.08 |
| 2 | M4 Hex Nut | Mcmaster | $0.02 |
| 4 | M5 Washer | Mcmaster | $0.08 |
| 8 | M4 Washer | Mcmaster | $0.15 |
| 8 | 3/16" ID x 0.135" aluminum grommet | Mcmaster | $0.82 |
| 12 | No.2 x 0.25" wood screws | Mcmaster | $0.30 |
| 1 | 6mm OD x 4.9mm ID x5" aluminum tubing | Mcmaster | $1.35 |
| 2 | 29.3mm x 3.52mm compression spring | Mcmaster | $0.15 |
| 4 | 6" length stiff steel wire or un-bent paper clip | found in the office | $0.15 |
| 1 | 6mm ID drinking straw | Mcmaster | "found" near an icee vendor |
| 1 | 3mm MDF sheet ~12"x12" | AlwaysHobbies.com | $0.93 |
| 1 | 1" width x 1.5" length ahesive hook/loop | Mcmaster | $0.25 |
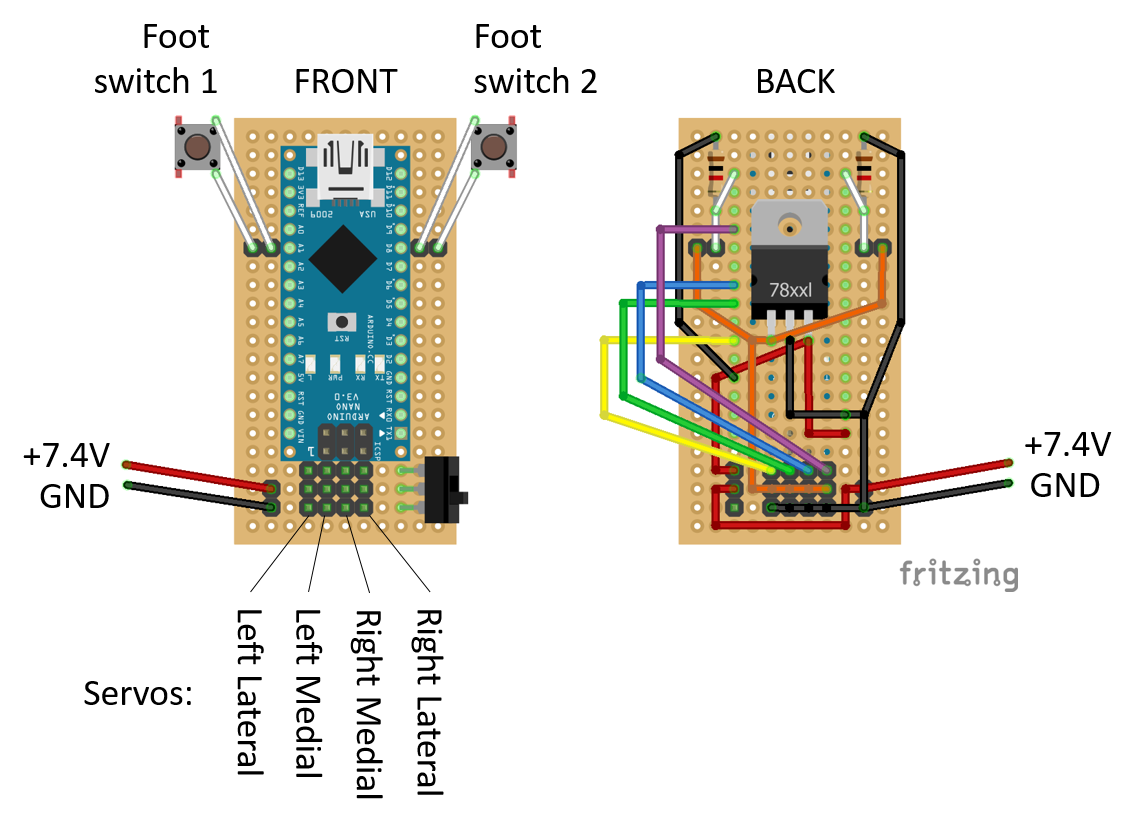
Electrical:
| Quantity | Part | Supplier | Cost |
| 1 | Arduino Nano | Amazon | $21.95 |
| 1 | LM7805 voltage regulator | Digi-Key | $0.95 |
| 2 | 1K Ohm resistor | Digi-Key | $0.20 |
| 2 | 6 pos , 2x3 male header | Amazon | $0.84 |
| 1 | 1.5inx2in PC board | Amazon | $3.36 |
Substitutions
The largest expense of the current robot model is the Arduino Nano used for control, however this is overkill. Only 4 PWM outputs and two digital inputs are necessary to drive this version of the robot. Many other low cost microcontroller modules are available off-the-shelf that could be used instead. Some possible alternatives include:Any component or material can be substituted for another of your choice; in fact, it is encouraged!
File Downloads
DXF PartsEagle CAD Schematic
Arduino code
Cool Links
Useful, inspirational, and creative online resources for building robots and more from rapid, low-cost fabrication techniques.
thingiverse.com
Open source CAD models for 3D printing, laser cutting, etc.
instructables.com
Detailed tutorials for building many things.
makezine.com
Maker news, inspiration, and ideas.
adafruit.com
Blog and online electronics store.
sparkfun.com
Blog and online electronics store.
Charles' blog
A blog by a great Maker
Shane's blog
Another blog by a great Maker
DYNAMIC WALKING 2017
Matthew Robertson, Jamie Paik, Reconfigurable Robotics Laboratory
Amy Wu, Auke Ijspeert, BioRobotics Laboratory